Science and technology
working with nature- civil and hydraulic engineering to aspects of real world problems in water and at the waterfront - within coastal environments
There is nothing noble in being superior to your fellow man; true nobility is being superior to your former self. Who can be a better person than Ernest Hemingway (1899 – 1961) – to write this in his skillful way of crafting words in a lucid and attractive style? Sayings similar to this have been penned down in several pieces of WIDECANVAS in different contexts – not to advance is to fall back – change and refinement as a show of intelligence – maturity – adaptation . . . etc. But Hemingway touched upon a very important aspect of human mind. That being taken over by superiority or inferiority complex (see aspects of it, in Some Difficult Things) – inhibits a person’s ability to think and function normally. This piece is nothing about these complexes – but on something that define Nature – in this case, the transmission or propagation of errors or uncertainties in wave loadings on coastal structures. Uncertainty (U), in its simplest term, is just the lack of surety or absolute confidence in something.
Uncertainty Propagation (UP) refers to the transfer of uncertainties from the independent variables into the dependent variable – simply put, from the known to the unknown. It is transferred in an equation or relation – from the individual variables on right hand side – into the dependent variable on the left. More commonly the propagation process is referred to as error propagation. The two – error and uncertainty are often used interchangeably. In quantitative terms, while error refers to the difference between the measured and the true value – uncertainty refers to the deviation of an individual measurement from the arithmetic mean of a set of measurements. As we shall see, the magnitude of propagated uncertainty is a function of the type of equation (e.g. linear, non-linear, exponential, logarithmic, etc). Uncertainty of a parameter implies that, if it is measured repeatedly – one would find that there is no single value – rather a range of random values accrue that deviate from the arithmetic mean (AM, µ) of the measured set. One needs a method or standardization to characterize the scattered deviations. If the deviations are distributed symmetrically about the arithmetic mean – then a Gaussian (German mathematician Carl Freidrich Gauss, 1777 – 1855) bell-shaped curve can be fitted. One property of such a distribution is defined as the Standard Deviation (SD). This is estimated as the square root of variance (defined as the mean of all deviations squared). If SD is normalized by dividing it with AM – the GD turns into Normal Distribution or ND. The normalized SD, σ/µ, termed as the Coefficient of Variation (CV) – is SD relative to AM. Its distribution follows the symmetry about the mean – and as a fraction or percentage, it covers both sides of the mean. It is like the unit of standard deviation – e.g. 1SD unit saying that 68.2% of the data are scattered on both sides of the mean. A high value of CV is the indication of a large scatter about the mean. CVs are due to nature of the variable in their random response to different forcing functions or kinetic energy (see Turbulence) – and are therefore termed as random uncertainty or simply uncertainty (see more on Uncertainty and Risk). It is the signature characteristic of the variable – and is due to many other factors including the applied measuring or sampling methods. Not all variables follow the Gaussian distribution (GD), however. For example, a discrete random variable, like an episodic earthquake or tsunami event – are sparse and do not follow the rules of continuity, and is best described by Poisson Distribution (PD, in honor of French Mathematician Simeon Denis Poisson, 1781 – 1840). An ideal example of a continuous variable that follows ND is coastal water level. In this piece, all applied variables are assumed to follow ND. Here are some typical CVs from R Soulsby (1997): water density, ±0.2%; kinematic water viscosity, ±10%; sediment density, ±2%; sediment grain diameter, ±20%; water depth, ±5%; current speed, ±10%; current direction, ±10o; significant wave height, ±10%; wave period, ±10%; and wave direction, ±15o. Error or uncertainty propagation technique has been in use for long time dating back to the now known method since 1974 (G Dalquist and A Bjorck). The most recent treatment of the subject can be found in BN Taylor and CE Kuyatt (1994) and in AIAA 1998 (The American Institute of Aeronautics and Astronautics). The propagated uncertainty has nothing to do with the scientific merit of a relation or equation; it is rather due to the characteristic or signature uncertainties of the independent variables – which according to the UP principle must propagate or transmit onto the dependent variable. . . . This piece is primarily based on four pieces posted earlier: Uncertainty and Risk; Wave Forces on Slender Structures; Breakwater; and The World of Numbers and Chances; and three of my papers:
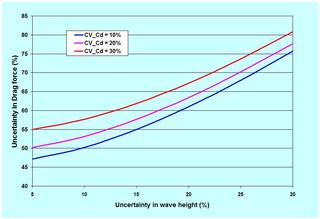
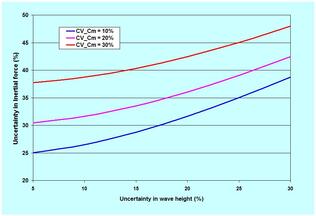
Before moving on, let me try to demonstrate how UP principle works – by discussing a simple example. Suppose, we consider an equation, X = Y^2 * Z. Let us say, the variables Y and Z on the right hand side of the equation have known CVs: ± y, and ± z, respectively. How to estimate the CV of X? According to the UP principle, the CV of X can be determined as the square root of x^2 = 2^2*y^2 + z^2. As an example, suppose, y = ±10%, and z = ±5%; then x must be equal to 20.62%. Further, a pertinent question must be answered. Why Uncertainty? or Why Uncertainty Propagation? The relevance of the questions stems from the quests to develop confidence of the relations or equations one uses to compute and estimate parameters for everything – from the science of Nature to Social Interactions to Engineering and Technology. These relations developed by investigators after painstaking pursuits convey theories and principles mostly on deterministic paradigm. But, things in Nature are hardly deterministic – which means the independent variables on which a relation is based – suffer from uncertainties of some kind due to their stochastic characteristics and variability. These uncertainties associated with the independent variables must be accounted for in the dependent variable or computed unknown parameter. Uncertainty propagation method developed over a period of many years – gives answer to the questions (see more on Uncertainty and Risk, and The World of Numbers and Chances). In engineering design processes, the traditional method of accounting for uncertainty is done simply by including some redundancy in the system – by the so-called factors of safety – conspicuously described and/or inconspicuously embedded in some practices (for example, using maximum load and minimum strength; and summation of different loads together although they may not occur simultaneously). Further elaboration on coastal design processes can be found in Oumeraci et al (1999), Burcharth (2003) and Pilarczyk (2003). They scaled the processes of design as: Level 0 – deterministic approach; Level I – quasi-probabilistic approach; Level II – approximate probabilistic approach; and Level III – fully probabilistic approach. In the Level 0 approach, parameter uncertainties are not accounted for, instead experience and professional judgment are relied upon to implant redundancy. This practice as a way of developing confidence or assurance – represents in reality – a process of introducing another layer of uncertainty – partly because of heuristics associated with judgments. Or in another interpretation, it amounts to over-designing structure elements at the expense of high cost. For the other three Levels, a load-strength reliability function is defined in different scales to account for parameter uncertainties. A note on significant wave height uncertainty is warranted. Although a typical ±10% is recommended by Soulsby, in reality the uncertainty can be varied. The reasons can be traced to how the local design significant wave height is estimated. Some likely methods that affect uncertainty are: (1) the duration, resolution and proximity of measurements to the structure; (2) extremal analysis of measurements to derive design waves; (3) in absence of measurements, applied analytical hindcasting or numerical methods to estimate wave parameters; and (4) applied wave transformation routines or modeling. Due to these diverse factors affecting uncertainty, instead of considering one uncertainty, this piece covers a range from10 to 30%. . . . Uncertainty of Wave Loading on Vertical Pile This portion of the piece starts with 2008 ISOPE paper and Wave Forces on Slender Structures. Unbroken waves passing across the location of a slender structure (when L/D < 1/5; L is local wave length and D is structure dimension perpendicular to the direction of force) cause two different types of horizontal forces on it. The basis of determining them is the Morison equation (Morison and others 1950). Known as the drag force in the direction of velocity, the first is due to the difference in local horizontal velocity head or dynamic pressure between the stoss and the wake sides of structure. The second, the inertial force is caused by the resistance of structure to the local horizontal water particle acceleration. Both of the Morison Forces have their roots in Bernoulli Theorem (Daniel Bernoulli; 1700 – 1782) – and as one can imagine, they are a function of water density – and of course, the structure size. The horizontal Drag Force: a function of water density, structure dimension perpendicular to the flow, water particle orbital velocity squared, and a drag coefficient. The horizontal Inertial Force: a function of water density, structure cross-sectional area, water particle orbital acceleration, and an inertial coefficient. To demonstrate UP of wave loadings at the water surface on a cylindrical vertical pile of 1 meter diameter – this piece relies on the same example wave discussed in Linear Waves; Nonlinear Waves; Spectral Waves; Waves – Height, Period and Length and Characterizing Wave Asymmetry. This wave, H= 1.0 m; T = 10 second; d = 10 m; has a local wave length, L = 70.9 m and Ursell Number (Fritz Joseph Ursell; 1923 – 2012) = 5.1; indicating that the wave can be treated as a linear wave at this depth. Other used and estimated parameters are: water density = 1025 kg/m^3; amplitude of horizontal orbital velocity at surface = 0.56 m/s; and amplitude of horizontal orbital acceleration at surface = 0.44 m/s^2. In addition, while using most typical uncertainties proposed by Soulsby – the Us of wave length, orbital velocity and acceleration have no typical values – therefore they are derived in the 2011 paper and in this piece applying the basic UP principle. The results of uncertainties in wave loadings are shown in the two presented images – one for the drag force (UDF), the other for inertial force (UIF). They are shown as a function of uncertainties in measured wave heights (U_H) for U_water density = 0.2% and U_linear dimension = 5%, with estimated U_cylindrical pile area = 10%. Since the uncertainties of coefficients (U_Cd and U_Cm) are not known, the images show three cases of them, 10%, 20% and 30%. Here are some numbers for U_H = 10% and 30%.
. . . Uncertainty of Wave Loading on Breakwater Armor Stone This portion of the piece primarily depends on materials developed and presented in the Breakwater (BW) piece posted earlier, as wells as on my 2011 paper. The state-of-the-art techniques in determining armor stone masses or sizes of rubble-mound breakwater and shore protection measures – rely either on Hudson Equation (RY Hudson 1958) or on VDM Formula (JW Van der Meer 1988). The applicability and relative merits of the two methods are elaborated in the Breakwater piece. For simplicity of analysis, I will focus on the uncertainty of Hudson Equation. This equation relates Stability Number to the product of a stability coefficient (KD) and a BW side slope factor. The equation provides estimates of median armor stone mass as: a product of the stone density and wave height cubed – divided by the product of KD, side slope factor, and relative stone density cubed. It is assumed that armor stone is forced by H = 1.0 m on the BW seaside slope = 1V:2H; with stone density = 2650 kg/m^3 and water density = 1025 kg/m^3 giving a relative stone density = 2.59. The uncertainties of relative density and side slope factor are not known, they are estimated at 2.01% and 7.1% using basic UP principle. The crux of the problem appears on defining the KD values. The recommended KDs vary from 1.6 for breaking to 4.0 for non-breaking wave forcing (USACE, 1984). Melby and Mlaker (1997) reported that the KD values have uncertainty of some ±25%. In this piece the uncertainties median armor stone mass U_M50 for KD uncertainties ranging from ±10% to ±25% are investigated. Some estimated numbers are:
. . . The Koan of this piece on this International Jazz Day: What seems to be perfect to an ordinary eye – is never finished, never perfect in the creator’s eye. The creative works continuously explore, experiment and search for something – that never comes to the satisfaction of the creator. . . . . . - by Dr. Dilip K. Barua, 30 April 2021
0 Comments
Leave a Reply. |
 RSS Feed
RSS Feed
